 از ایده تا طراحی ایده های الکترونیکی خود را به واقعیت تبدیل کنید
از ایده تا طراحی ایده های الکترونیکی خود را به واقعیت تبدیل کنید

سلام
اگر شما هم مثل من مایلین ربات های خفن و یا ماشین های کنترلی دست ساز و توپ رو درست کنید پیشنهاد می کنم این مقاله رو حتما بخونید.
قبل از هر چیز در مورد اهداف نوشتن این مقاله بگم خدمتتون:
۱- اشنایی با ساخت درایور موتور پل H با استفاده از ماسفت و تراشه های درایور
۲- استفاده از ماژول های NRF در پروژه های رباتیک به عنوان ریموت
۳- اشنایی با سرو موتور
۴- اموزش ساخت باتری شارژی برای ربات ها
۵- اشنایی با ساختار ماشین های کنترلی معمولی
بریم سراغ مراحل ساخت
رباتی که تصویرش رو ملاحظه کردین به صورت اماده از بازار تهیه شده. چند سال پیش یه برد کنترلی با درایور L298 براش طراحی کردم که به دلیل تقلبی بودن تراشه و اینا کلا دو بار بیشتر کار نکرد.
اینبار برای ربات جنگجوی خودم ایده ای به ذهنم زد و گفتم بهتره قبل از عملی سازی روی دستگاه اصلی بیام یه بار دیگه روی این ربات تستش کنم.
خلاصه اومدم با استفاده از ماژول های NRF یه ریموت به صورت زیر براش ساختم.
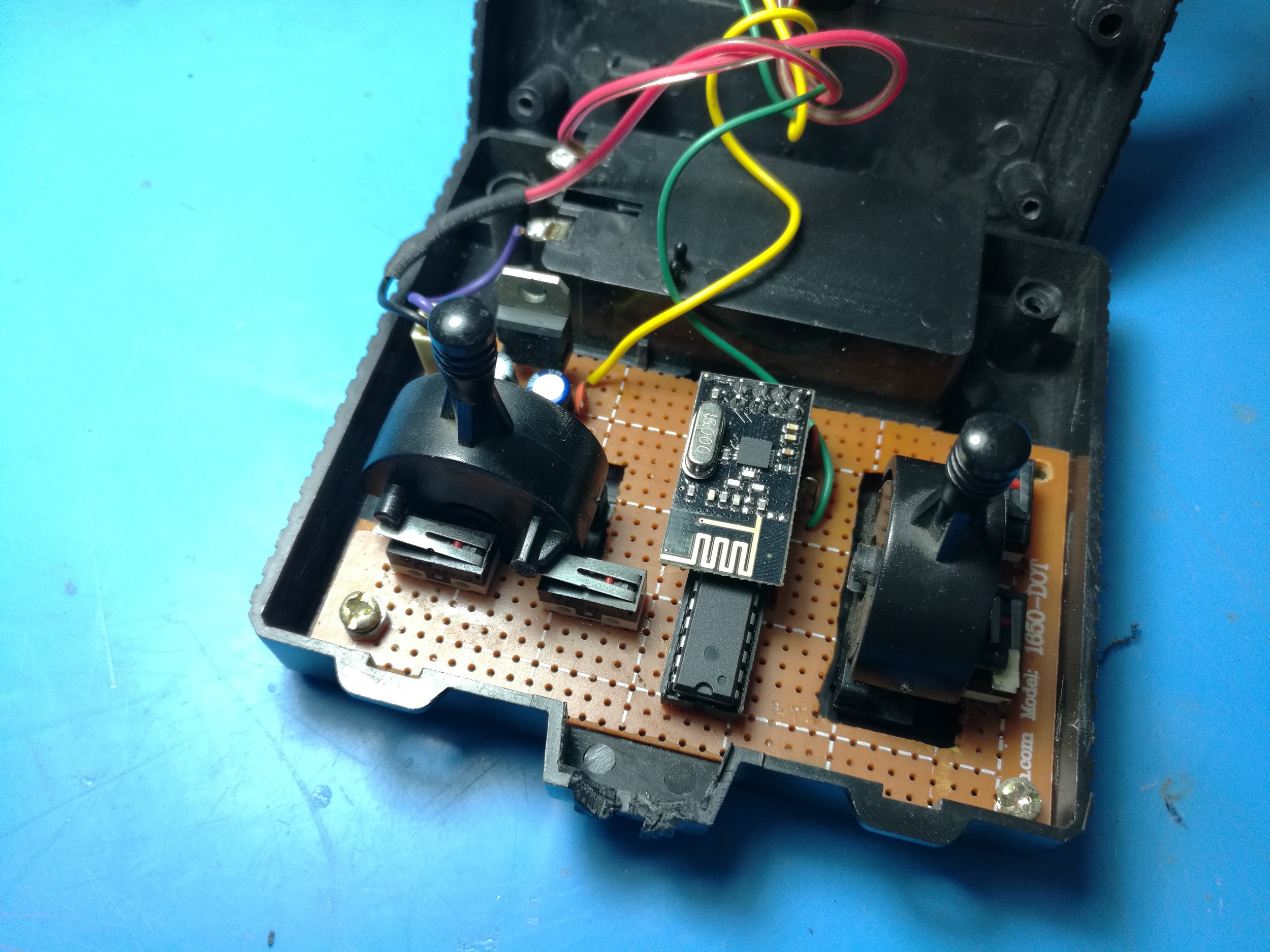
جعبه ریموت رو هم خیلی وقت پیش از بازار گرفته بودم و به راحتی شما هم می تونید اون رو تهیه کنید حتی خیلی بهتر و با امکانات بیشتر از مال من. کسی در تهیه ریموت مشکل داشت به صورت خصوصی به بنده پیام بده در خدمتش هستم.
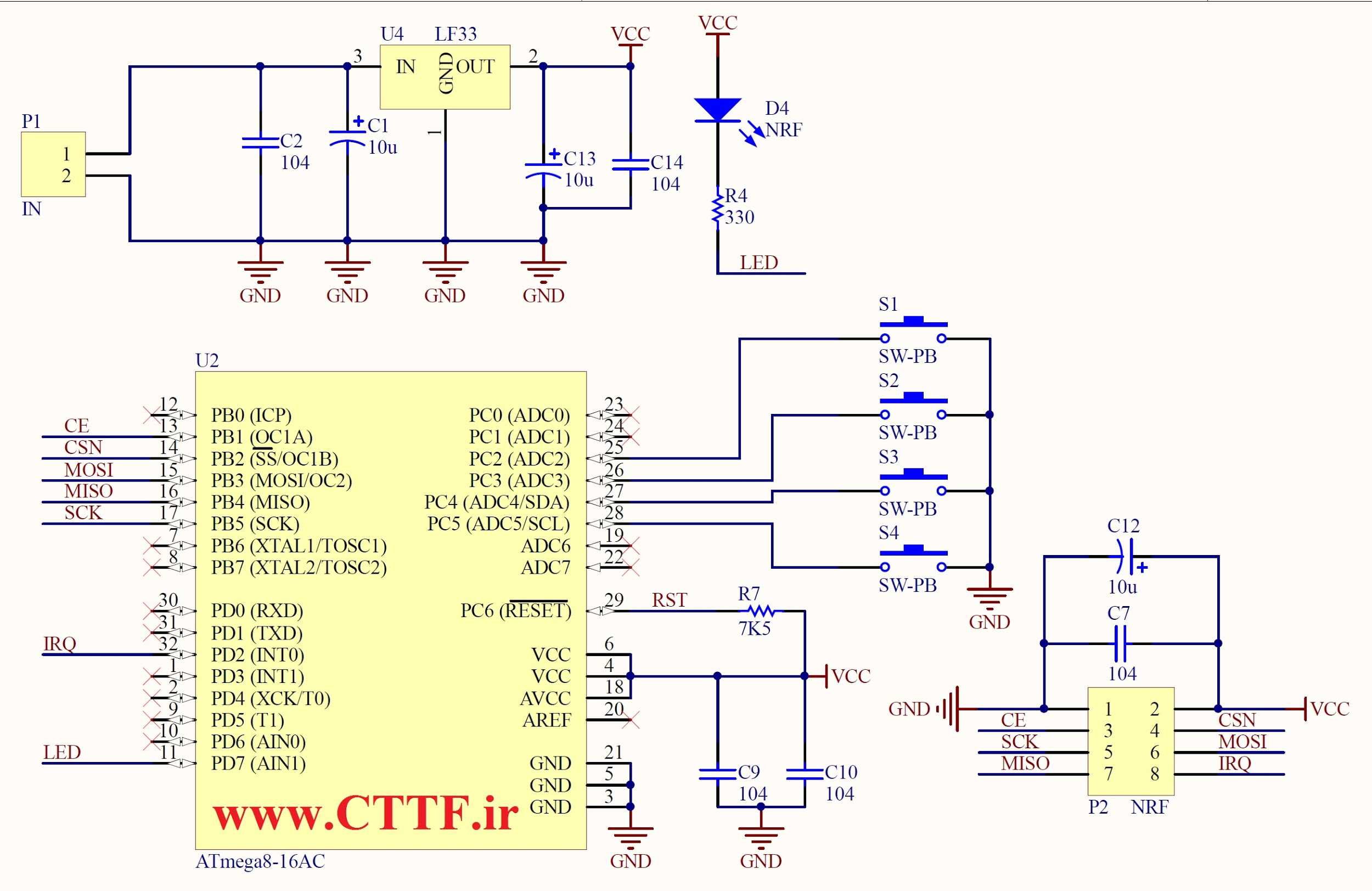
شماتیک ریموت به صورت زیر هستش:
خب این بخش ریموت که یا می تونید تو یه جعبه شیک قرار بدین یا اصلا بدون جعبه باشه. صلیقه داشته باشین می تونین با پلکسی و برش لیزری خودتون یه چیز تک بسازید.
در قسمت گیرنده یعنی شاسی و بدنه ماشین سه تا بخش داریم.
۱- قسمت فرمان
۲- قسمت حرکت
۳- قسمت تغذیه
۱- قسمت فرمان
در این ماشین های کنترلی قسمت فرمان شامل یک موتور DC خیلی ساده س که با چندتا چرخ دنده هم محدود شده و هم سرعتش به قدرت تبدیل شده.
در این قسمت یه فنر گذاشتن تا در صورتی که موتور بخش فرمان حرکتی نکرد به صورت اتوماتیک فرمان رو در وسط نگه داره. به تصویر زیر دقت کنید.
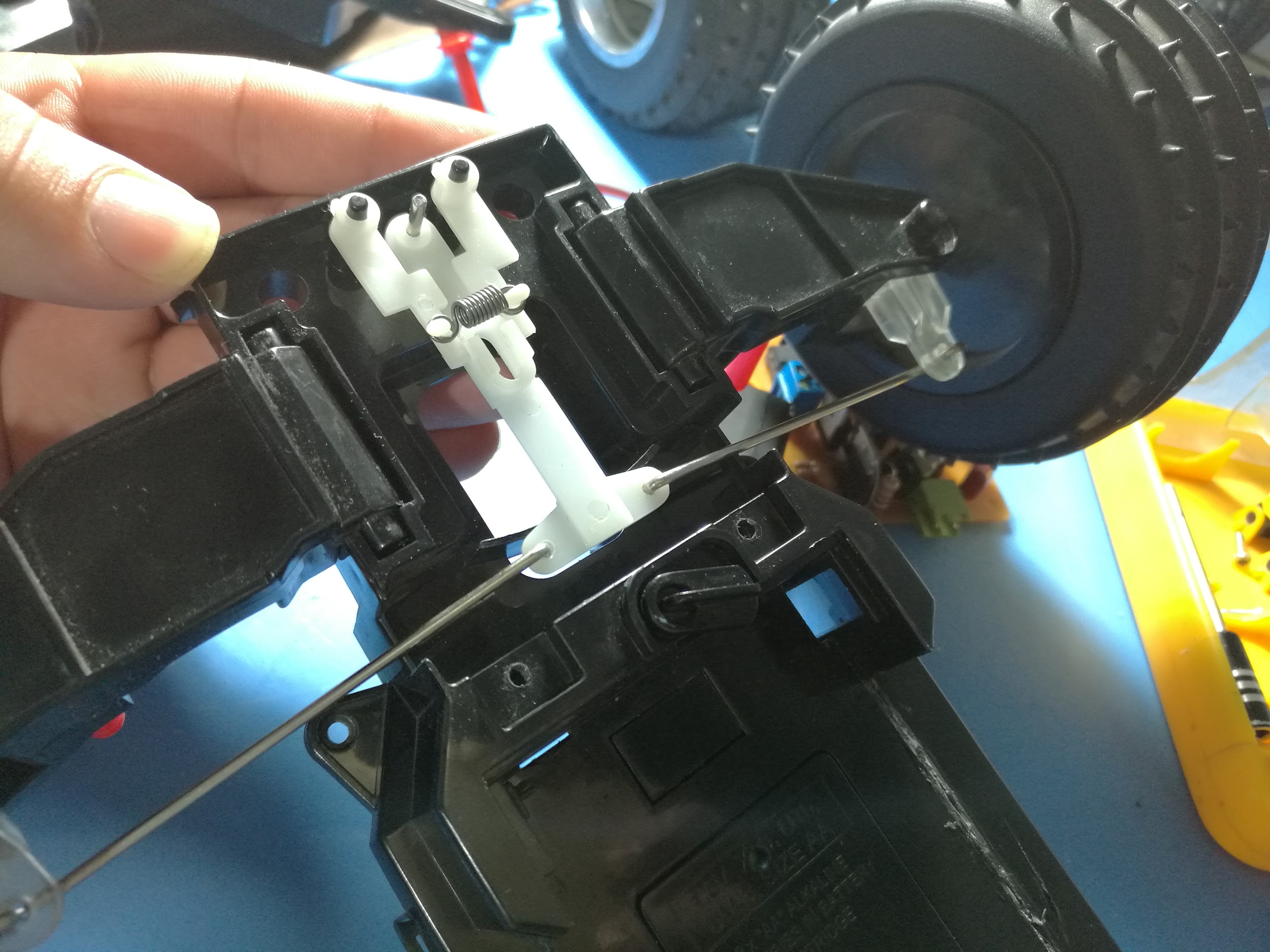
موتور DC هم خیلی ضعیف بود و هم اینکه من باید یه مورد رو تست می کردم و اونم استفاده از سرو در این مکانیزم که تو تصویر بالا مشخص هست به جای موتور DC. در نتیجه کلا موتور و متعلقات خودش رو در اوردم و یه سرو دنده فلزی قوی جایگزین کردم. حالا نکته اینجاس که چرا یه سرو دنده فلزی؟
شاید به ظاهر این مکانیزم انچنان نیرویی برای چپ و راست شدن نخواد ولی دقیقا برعکس! اگر مثل من یه حرکت سریع و خوب بخواین باید یه موتور با گیربکس فلزی و قدرتی بیشتر از ۱۵ کیلو رو استفاده کنید. البته این مشخصات موتور برای بدنه ای که من استفاده کردم هستش چون هم خیلی بزرگه و هم خیلی سنگینه.
نکته دیگه اینکه وقتی سرو استفاده می کنید باید اون فنر کوچک وسط که بالاتر کارش رو توضیح دادم همراه با دوتا پلاستیکی که نگهش داشتن رو حذف کنید.
خود سرو موتور چطور کار می کنه؟ یه مقاله کامل می نویسم و برای همین این خط رو فعلا بدون لینک میزارم.
۲- قسمت حرکت
در قسمت حرکت ما یک موتور DC 12 ولت با جریان تقریبا ۳۰۰ میلی امپر داریم که خروجی موتور وارد بخش دیفرانسیل شده(واقعا ساختار جالبی داره و وقتی یکی از لاستیک ها قفل بشه کل نیرو به چرخ دیگه منتقل میشه).
در نتیجه چیزی که لازم داشتم یه درایور موتور DC خوب بود که با استفاده از ماسفت اون رو ساختم و درایو خود ماسفت هارو توسط TC4427 انجام میدم.(اینجا تشکر ویژه ای دارم از مهندس محمدشاهی عزیز)
درایو من کاملا سرعتش از کمترین تا بیشترین مقدار کنترل میشه وگرنه میشد خیلی راحت ترم درایور ساخت اما چون هدف طراحی یه مدار کارامد برای ربات های قویتر بود در نتیجه خواستم یه بار طراحی انجام و تست بشه.
شماتیک مدار گیرنده به این صورته:
![]()
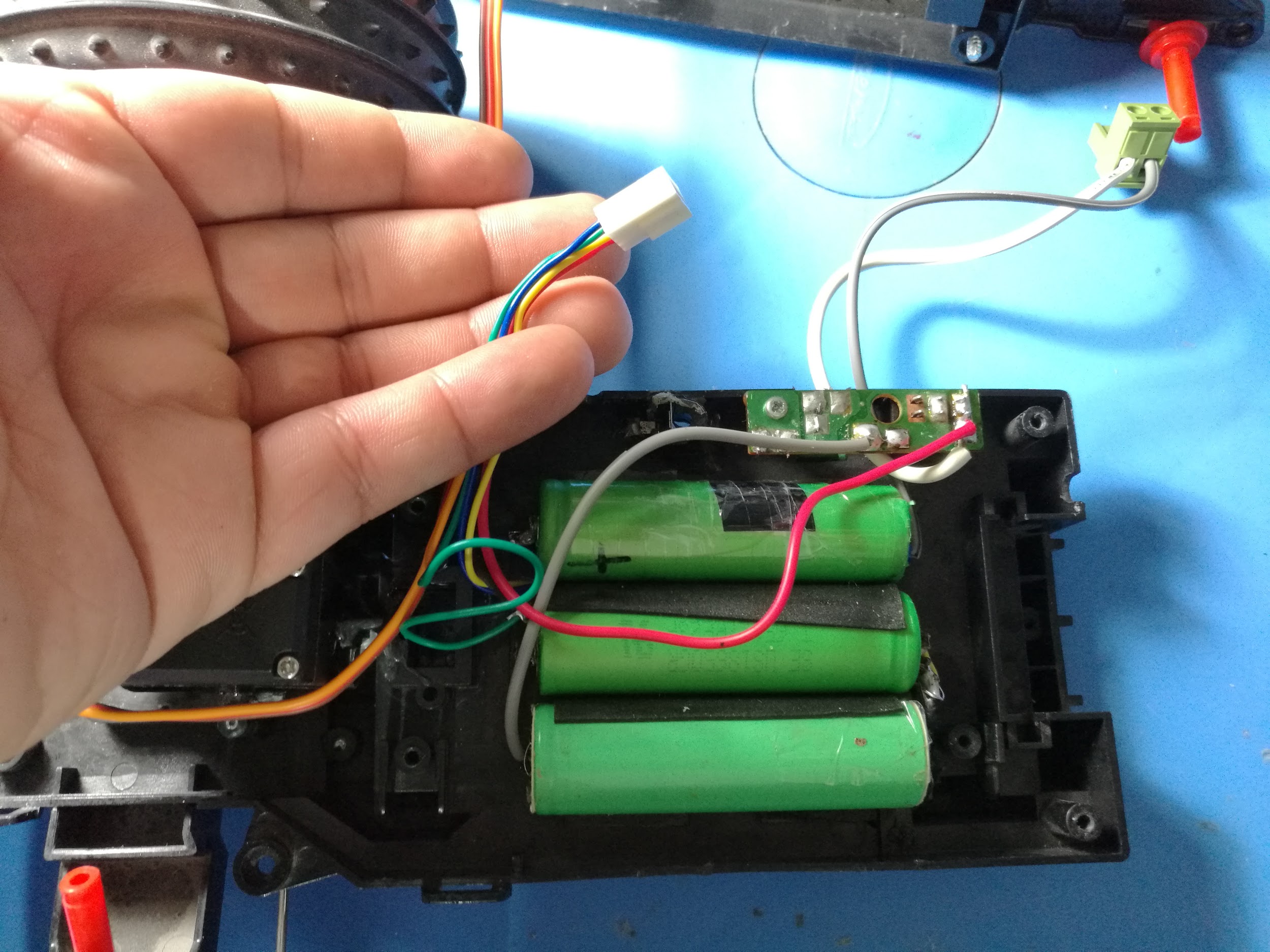
۳- قسمت تغذیه
برای تغذیه مدار من اومدم از باتری های لیتیومی یونی استفاده کردم. با توجه به اینکه خودم به تعداد دلخواه باتری لیتیومی لپ تاپ دارم در نتیجه سه تاشون رو اوردم و با هم سری کردم و شد تغذیه خودرو. دوام و قدرت بی نظیری داره و توصیه می کنم در انتخابشون برای ربات هاتون لحظه ای دریغ نکنید. مگر جریان لحظه ای زیاد بخواد مثل کوادها که اون موقع برین سراغ لیتیوم پلیمر.
در مورد شارژر من از این کوچولو که می بینید استفاده کردم و چهارتا سیم کشیدم بیرون که هر بار یکی از سل ها رو باهاش شارژ می کنم. ابزار دم دستم این بود و خرجی هم برام نداشت در نتیجه شد بهترین گزینه.
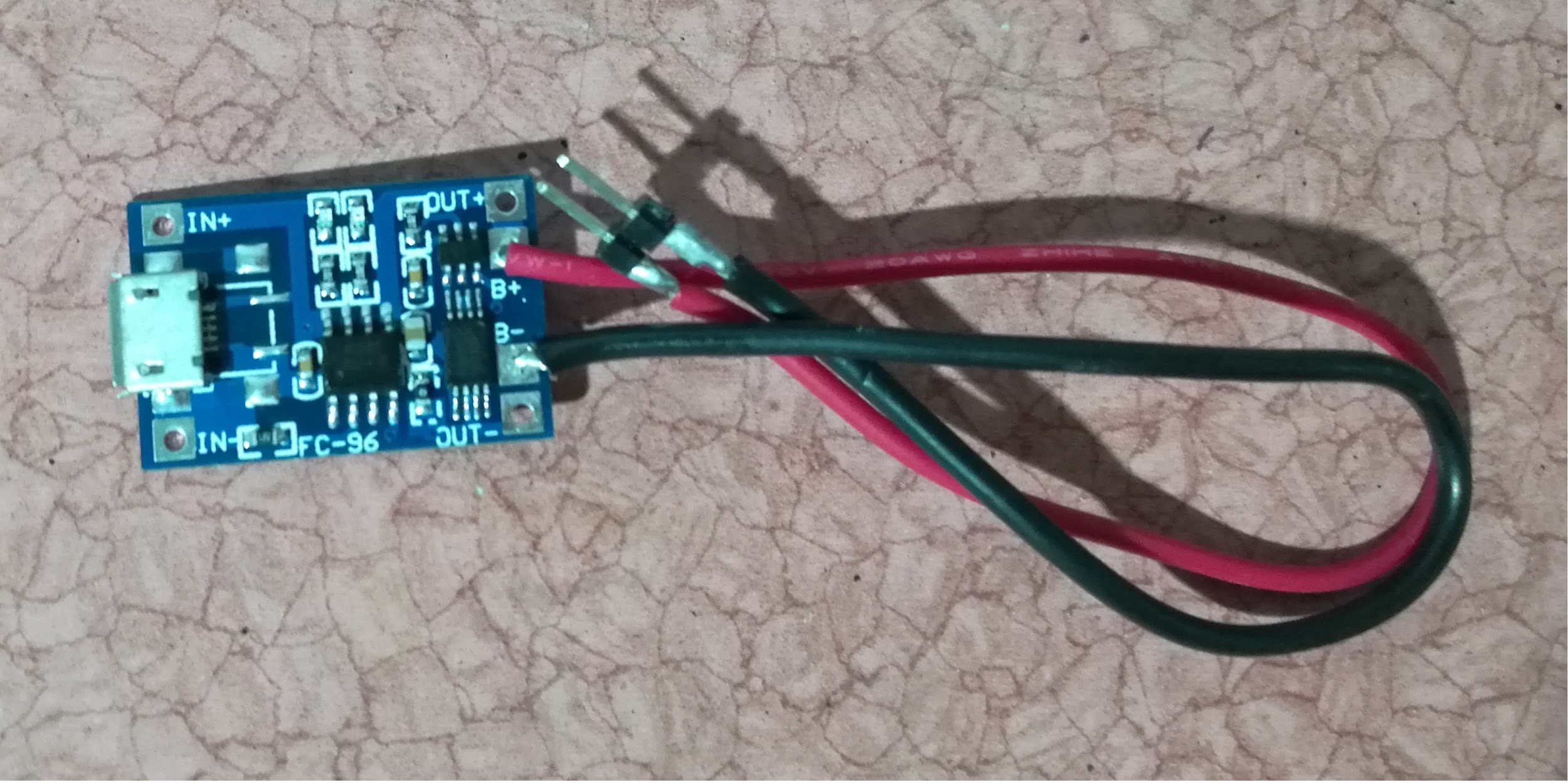
و در مورد اتصالات باتری ها هم خیلی ساده سری شده و از هر اتصال یک سیم برای شارژ بیرون کشیده شده.
و اما تصاویری از برد ساخته شده برای دستگاه
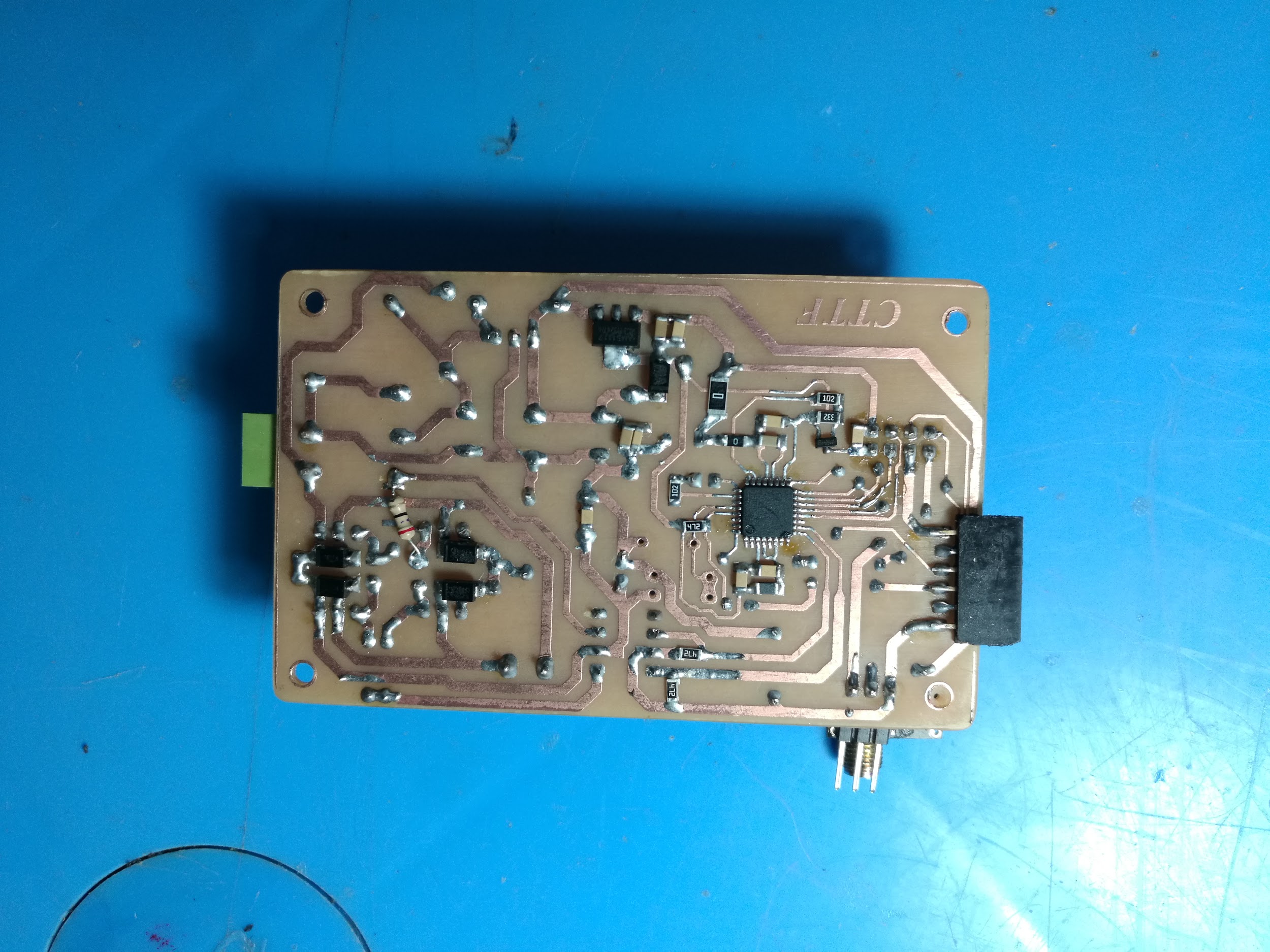
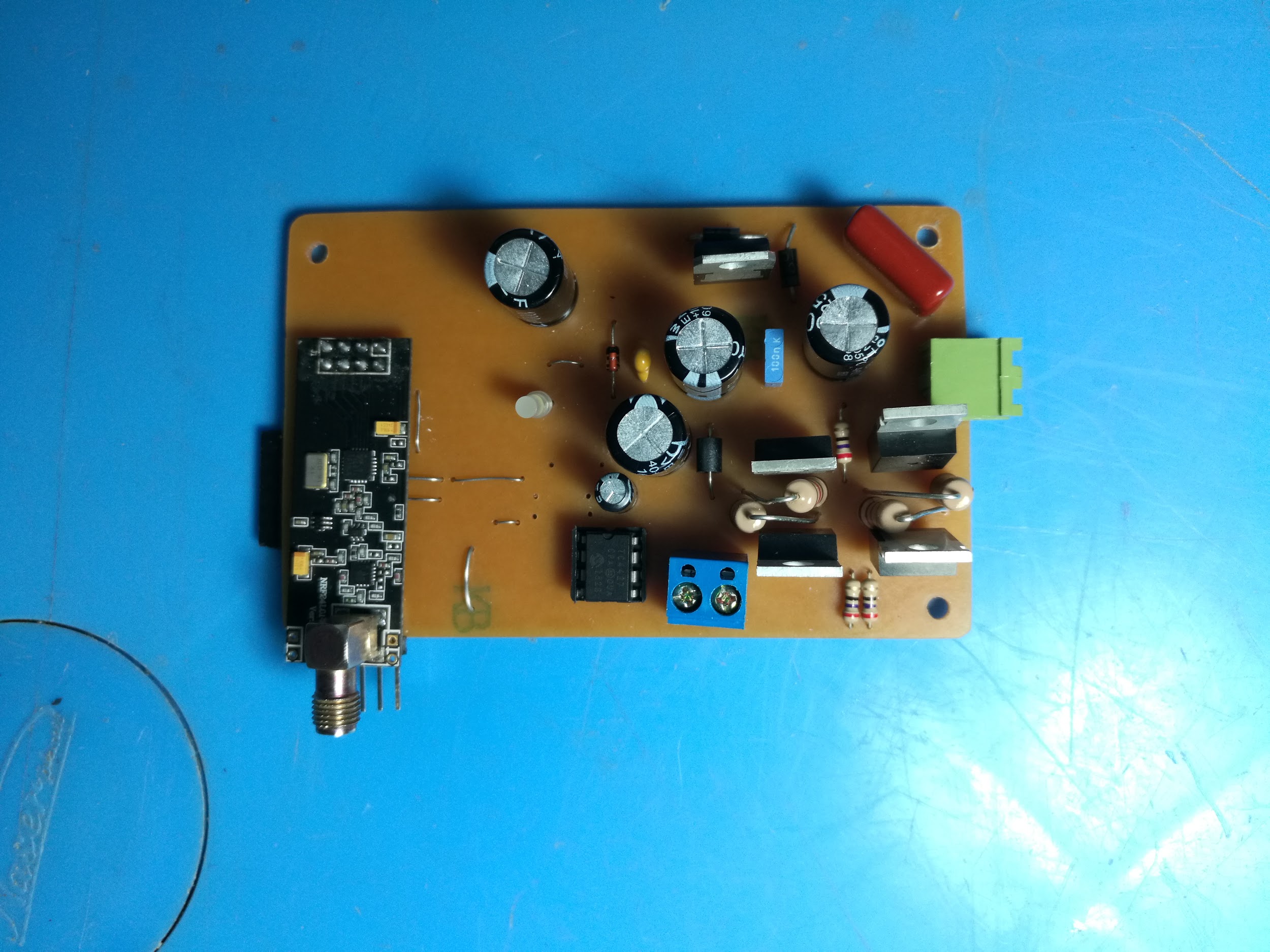
و اما نهایت کار میشه این


اینم ویدیویی از کارکرد ربات ما
در نهایت فایل های پروژه شامل شماتیک و PCB گیرنده + شماتیک فرستنده + هگز هردو مدار.
اگر پروژه فیدبک مناسبی داشته باشه از طرف دوستان قطعا سورس ها هم ارائه میشه.
خیلی هم عالی من یکیش رو با بلوتوث ساخته بودم ولی نه در این حد
سلام
ممنون از مطلبی که گذاشتین، می دونم گذاشتن مطالب آموزشی در سایت کار پر زحمتیه.
اگه سورس پروژه ،خصوصاً قسمت مربوط به NRF را بگذارید ممنون میشم
سلام دوست عزیز
انشالا با حمایت شما دوستان مطالب بهتر و جذاب تری رو قرار خواهم داد. در مورد سورس پروژه هم قبلا اطلاعاتی ارائه شده اما به زودی با توضیحاتی جامع سورس مربوطه هم قرار داده خواهد شد.
سلام بر استاد سوران گل
خلیلی عالیه این ماشین
سورس برنامه رو کی روی سایت قرار میدین؟ ممنون میشم بگین
فعلا تا ساخت ورژن جدید سورس رو قرار نمیدم.
البته با توجه به اینکه آموزش راه اندازی ماژول NRF قبلا در سایت قرار داده شده مشکلی برای ساخت ریموت نخواهید داشت.
با تشکر از شما
سلام استاد
ماشین قراره آپدیت بشه؟
بله البته زمان می بره ولی دارم کارهایی روش انجام میدم.
سلام مهندس لطف میکنید سورس های ماشین کنترلی با NRF رو به ایمیل من بدید هزینش هم رو تقدیم میکنم
با تشکر
با سلام خدمت شما دوست عزیز
قبلا در سایت نمونه کد راه اندازی ماژول های NRF قرار داده شده و می تونید از اون ها با کمی تغییر استفااده کنید.
در غیر این صورت با ادمین در ارتباط باشید.
با سلام خدمت شما مهندس عزیز، من برد فرستنده و گیرنده شما رو ساختم یه مشکلی که دارم اینه که ماشین فقط به جلو میره،نه دکمه عقب کار میکنه و نه چپ و راست، میخواستم ببینم چجوری مشکلمو حل کنم، اگه سورس رو داشته باشم شاید بشه فهمید مشکل از کجاست، زحمت سورس رو برام میکشید؟ شرمنده حدود سه هفته هست درگیرشم
با تشکر از راهنمایی و خدمات بسیار مفیدتون
با سلام
لطفا با ای دی @souran_arasteh در تلگرام در ارتباط باشید.
در مورد مشکلتون در خصوص برد باید دقت کنید که حرکت های چپ و راست از طریق سرو انجام میشه. احتمالا جایی رو اشتباه کردین که با ادمین در ارتباط باشین تا کمکتون کنن.
سلام مثل همیشه گل کاشتی
سلام
ممنون دوست عزیز:)
خیلی خوبه ولی هزینش چقدر میشه
خب این یک ماشین دست سازه شاید قیمتش از نمونه چینی بیشتر باشه اما تفاوت اصلیش اینه ده برابر بیشتر کار می کنه و مهمتر اینکه لذت ساختش و استفاده ش هم هست.
سلام مهندس
نمیدونم درست متوجه شدم یا نه اما شما از دو موتور تو این پروژه استفاده کردین ؟ اگر جواب مثبته لطفا یه کوچولو درباره عملکرد هر کدوم به طور ساده و مختصر توضیح بدید
ارادتمند
سلام
بله درست متوجه شدید
توضیحات کامل در وب سایت قرار داده شده. یک موتور برای بخش حرکت که موتور DC هستش و یک موتور برای تغییر جهت یا فرمان در نظر گرفته شده که سرو موتور انتخاب شده.
موردی باشه بازم در خدمتم.
سلام و درود فراوان من خیلی دوست دارم که یک چیزی استفاده کنم که حاصل دسترنج خودم باشد. همچنین چون کمی به ماشین های کنترلی علاقه دارم یه ماشین دارم که چون ضعیفه و باتری کنی نگه میداره می خواهم ارتقاش بدم. در ضمن تقریباً هیچ گونه اطلاعاتی در این زمینه ندارم. لطفاً میشه راهنماییم کنید
با سلام
چرا نمیشه. بیشتر اطلاعاتی که نیاز دارین در همین ارسال موجوده. بخونید متن رو و اگر موردی بود بنده در خدمتم. احیانا قطعات خاصی هم نیاز داشتین می تونید با پشتیبانی هماهنگ کنید.
سلام
مهندس عزیز یه سوالی داشتم
من هر جا گشتم کتابخونه ماژول nRF24L01 برای پروتیوس رو نتونستم پیدا کنم، شما دارید کتابخونشو بهم بدید ؟
متشکرم
سلام
کلا من یادم نیست اخرین باز کی روتئوس رو نصب کردم و هیچ گونه کاری رو متاسفانه یا خوشبحتانه در این نرم افزار تست نمی کنم.
با سلام
ممنون از سایت خوبتون می خواستم بدونم میشه به جای کیلید هایی که در کنترول گزشتیم از پتانسیومتر استفاده کنیم؟
خیلی ممنون
سلام و سپاس
بله میشه ولی اگر منظورتون استفاده از جوی استک هایی هست که پتانسیومتر دار هستند باید با یک مدار واسط مقدار پتانسیومتر رو بین 0 و 5 ولت محدود کنید چون مقادیر انالوگ رو نمی تونید به پورت های دیجیتال بدین.